| 上一篇 | 目录 | 下一篇 |
本文介绍了如何进行基本的电子罗盘(或者也叫指南针)校准。它假设您在飞控至少有一个内置或者外置电子罗盘,并已经启用。 请参阅高级电子罗盘设置以获取更多信息并设置其它电子罗盘相关功能。
提示:当飞行器在一个新的地点飞行时,无需重新校准罗盘,因为ArduPilot包含一个“世界磁模型”,可以在不重新校准的情况下将该位置的磁北转换为真北。此外,该位置的“倾斜度”是在启动时和起飞后不久校准的。重要的是,在完成罗盘校准后,飞行器需要有良好GPS信号进行3D gps锁定,以确保获得最准确位置。如果有必要,在做罗盘校准之前,请到户外以获得一个好的3D gps锁定。
注意:当飞行器解锁后不能进行罗盘校准。
校准第一步
警告:请勿在任何金属或产生磁场的物体(电脑、手机、金属桌子、电源等)附近校准罗盘,否则会发生错误的校准。
在“初始化设置”的“必要硬件”的点击进入指南针。
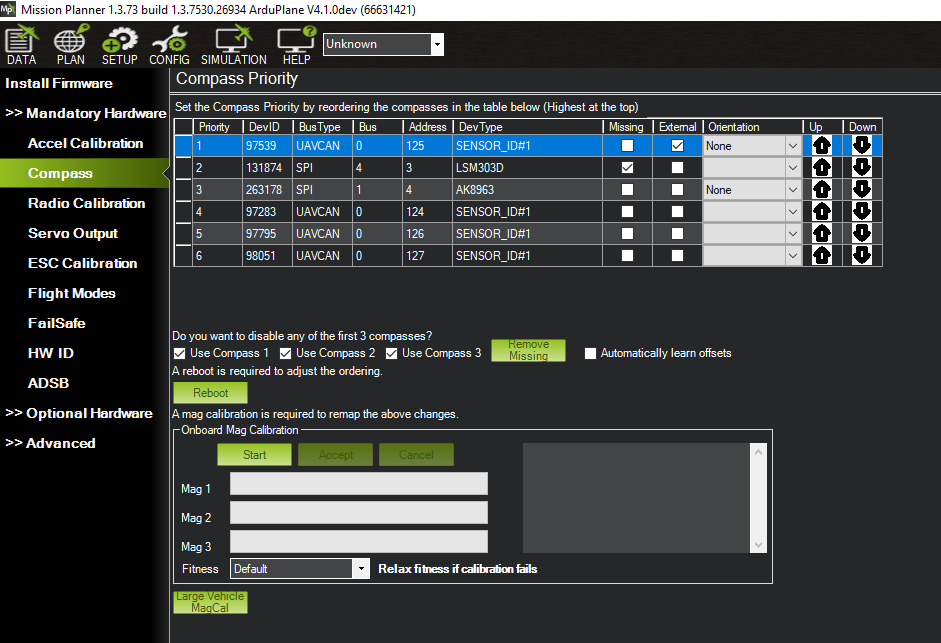
Mission Planner: 指南针校准
如果你在解锁前经常看到“不一致的罗盘”消息,并且你确定外部罗盘已校准,则你需要禁用任何内部罗盘。
板载校准
“板载校准”是在飞控上运行的校准程序。这种方法比在地面站上运行的旧的“外置校准(Offboard Calibration)”(又名“Live Calibration”)更准确,因为除了偏移量之外,缩放和方向也是自动确定的。
注意:如果飞控方向参数不正确,则板载罗盘的校准可能会失败。
进行板载校准:
如果你的自动驾驶仪有一个蜂鸣器,你应该听到一个单一的音调,然后是短的哔哔声每秒钟一次。
把飞行器举在空中,旋转它,使每一面(前、后、左、右、上、下)依次指向地面几秒钟。也就是说要进行360度的旋转,每次旋转都指向不同的方向。
这样等于旋转6个圈,需要花点时间。如果没有通过校准(超时),则需要重新再来一次。

当飞行器旋转时,绿色条应该向右越来越长,直到校准完成。
成功完成后,将发出三声上升音并出现“请重新飞控”对话框,你需要重新启动飞控才能对解锁。
如果校准失败:
你将听到“不愉快”的失败提示音,绿色条可能复位到左边,并且校准程序可能会重新启动(取决于地面站)。Mission Planner 将自动重试,因此请继续按照上述说明旋转飞行器。
如果指南针未校准,请考虑移至远离磁场干扰的其他区域,并从你的口袋中拿走电子设备。
如果罗盘校准仍然失败,将 COMPASS_OFFS_MAX 从 850 提高到 2000 甚至 3000 可能会有所帮助。
最后,如果一个罗盘没有校准并且你确信其它罗盘工作正常,请禁用它。
使用摇杆的板载校准(没有地面站)
ArduPilot 支持“使用RC摇杆进行板载校准”,这意味着校准程序在不需要地面站,而在飞控上运行。这种方法比在地面站上运行的旧的“Offboard Calibration”(又名“Live Calibration”)更准确,因为除了偏移量之外,还计算了缩放。
首先需要RC校准。
开始罗盘校准,将油门杆拉拉到最低并右偏航2秒。
如果你的自飞控安装蜂鸣器,你应该会听到一个音调,然后是每秒一次的短促哔声。
把飞行器举在空中,旋转它,使每一面(前、后、左、右、上、下)依次指向地面几秒钟。
成功完成后,将发出三声升高的音调,你需要重新启动飞控才能对飞行器进行解锁。
如果校准失败:
你将听到失败提示音,校准程序将重新启动。
取消校准方法:保存油门杆向下和左偏航2秒。
如果多次尝试后仍无法校准指南针,请使用摇杆取消并使用上述地面站的的板载校准。
大型飞行器的地磁校准
大型或重型飞行器在所有轴上旋转是很难的。如果飞控的GPS锁定并处于活动状态,而且飞行器的实际航向是已知的,使用Mission Planner地图上的地标参考,还是使用另一个指南针(例如手机),输入飞行器航向就可以进行准确校准。
罗盘排序
如果需要,你可以在页面顶部更改附加罗盘的优先级。
附加信息
更多关于罗盘配置的信息可以在Advanced compass Setup中找到。
这包括有关如何设置附加罗盘、自动设置偏移、非标准罗盘对齐、罗盘等的说明。
关于磁干扰和减少它的方法的一般讨论可以在磁干扰中找到。