| 上一篇 | 目录 | 下一篇 |
Mission Planner 有许多对用户隐藏的高级工具。这些可以通过按Ctrl-F打开。很多高级工具只对开发人员或高级用户有用,但有一些对普通用户有用。
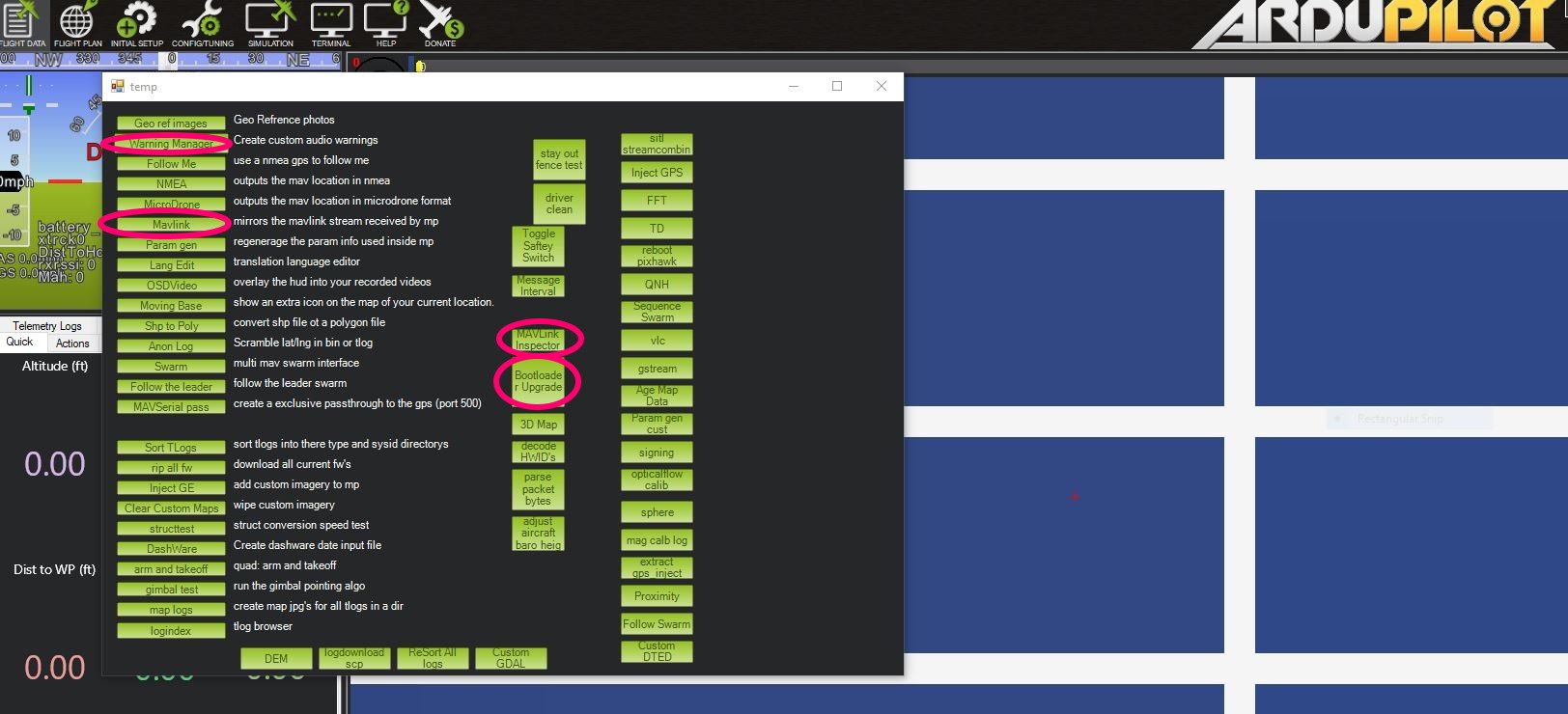
一些有用的工具包括:MAVLink Inspector(MAVLink检查器)、BootLoader Upgrade(BootLoader升级)、MAVLink(转发)和警告管理器。
MAVLink检查器
这允许实时检查正在发送的MAVLink值。用户可以实时查看正在发送并存储在Tlog中的任何测量/读取中的值。用户选择的历史数据也可以实时图形化。
BootLoader(引导加载程序)升级
通常,飞控供应商提供的引导加载程序可能已经过时。使用此功能将自动更新飞控的引导加载程序。如果它已经是最新的,则不会进行更新。
Mavlink
这允许通过互联网,把你飞控MAVLink数据流转发给具有公共 IP 地址的另一个用户。这通常用来让用户去帮助另一个用户调试问题。
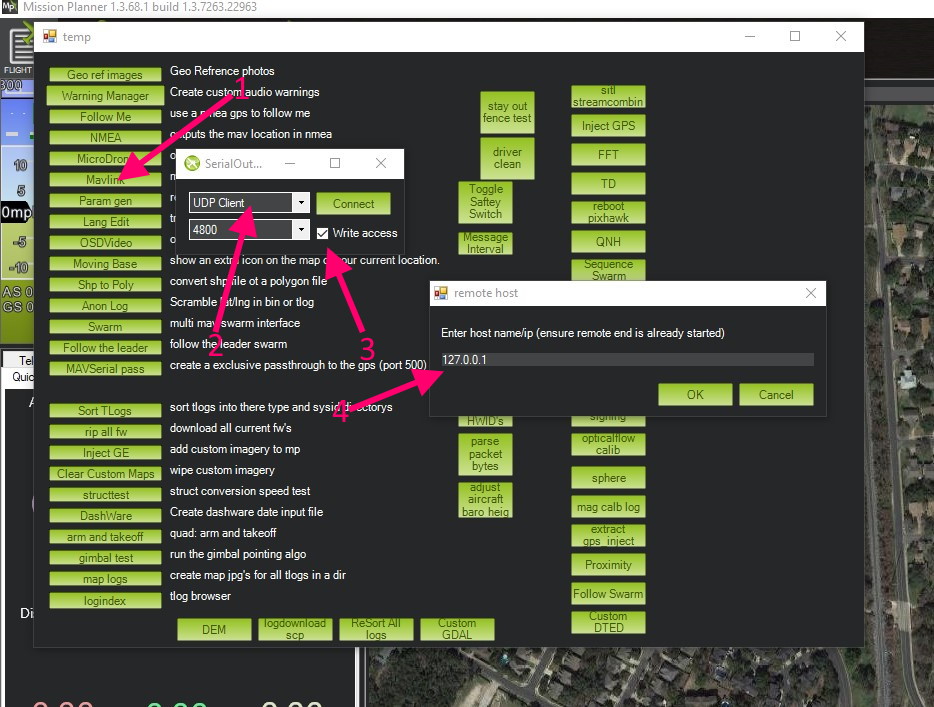
选择这个工具。
将自动打开一个有下拉框的新窗口,这里可以选择通信端口。如果使用远程连接,一般会选择 UDP。对于TCP或UDP,波特率选择框可以忽略。
如果您希望远程方能够更改您的自动驾驶仪上的参数或远程控制它,请单击此框。
点击“连接(Connect)”按钮,根据上步选择的通信端口,将要求输入接受端的的公共IP地址和端口。
完成之后,远程站点应该开始从飞控获取MAVLink数据包。数据包可以使用任何选择的地面站来进行接收。
注意:你只能将 MAVLink 数据包转发到一个位置。 通常建议使用UDP而不是TCP,因为TCP需要对数据包进行确认,产生的网络延迟会降低操纵杆响应度,甚至引起崩溃。UDP不断地发送控制命令数据包,而无需等待先前数据接收的确认。
本地转发
你还可以在本地转发,以便多个地面控制站可以连接到同一台PC上本地连接的飞控。在这种情况下,只需使用本地PC机的localhost的ip 地址 127.0.0.1。然后,你可以在同一台 PC 上连接另一个 GCS,如 MAVProxy 或 QGC。
警告管理
这允许让通过 MAVLink 连接到飞行器时候,几乎可以自定义任何测量/状态读数音频警告。
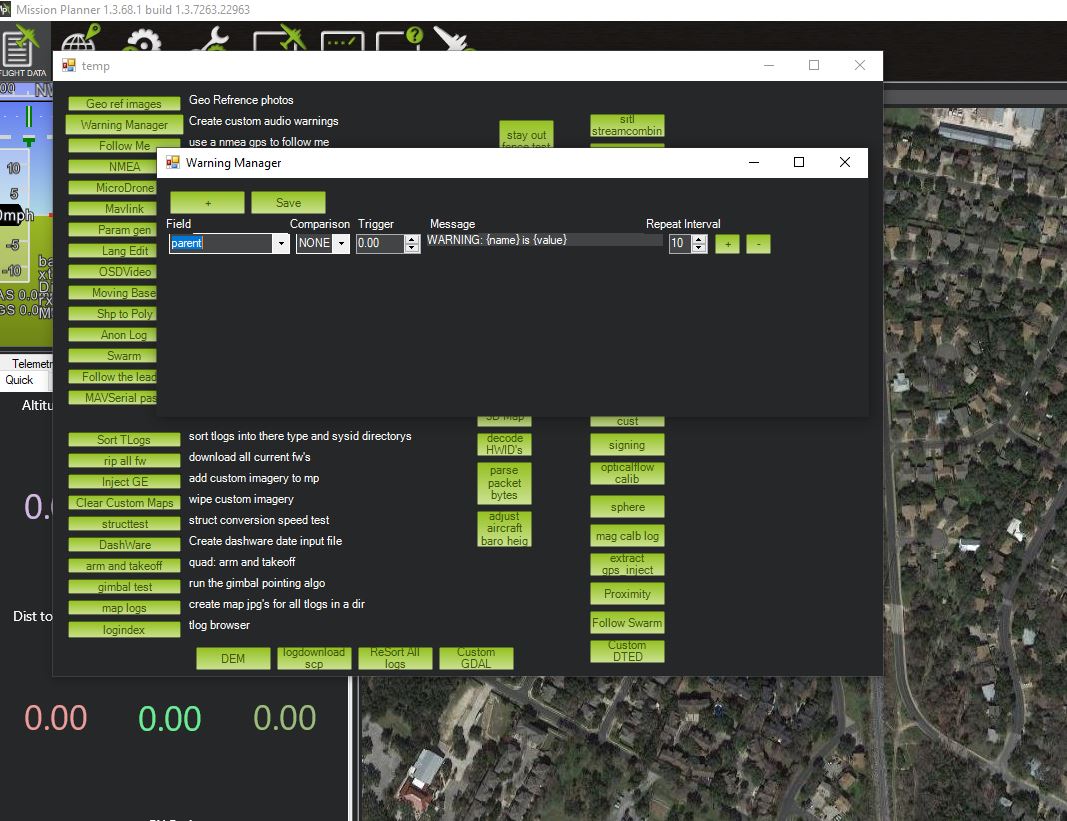
你可以从下拉列表中选择传入的数据项,并将其与限制值进行比较,然后将一个短语音保存并由Mission Planner读出。